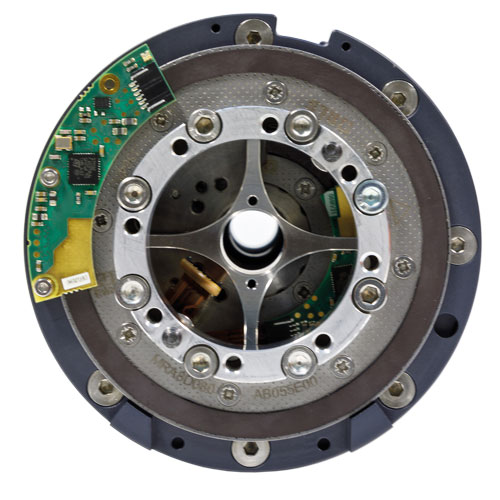
Actuators
The integrated actuation units feature high torque and power density. The passive compliance renders them sturdy as well as capable of high fidelity torque sensing and control.
Both features permit human-like soft but also harsh physical interaction with the environment. The actuators feature hard real-time interfaces. They are modular and customizable.
The existing actuator palette covers a broad power and torque range (see info sheet).

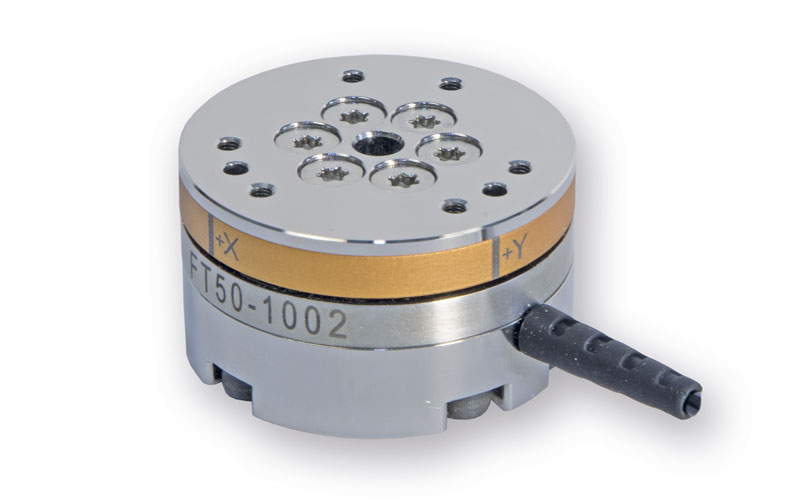
Sensors
The force torque transducers display low noise, low time and thermal drifts, low cross-talk of non-axial moments and low torque ripples transmission systems from connected application systems. They offer high linearity as well as hard real-time communication interfaces. The compact electronics ease application integration.
For more details check out the info sheet.
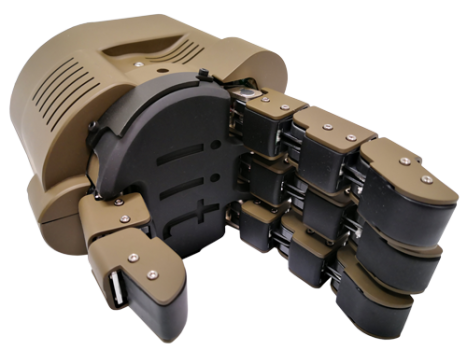
For details, check out the IEEE Robotics Automation Letters publication regarding HERII HAND.
Features